
Robotics and Autonomous Systems

Research on robotics and autonomous systems at KIT combines tradition and vision. It focuses on the engineering of human-centered technologies with unprecedented transformational effects on society and economy. We are envisioning technical systems for humans’ empowerment to ensure quality of life and a longer self-determined life in old age, to increase quality and efficiency in medicine and healthcare as well as productivity in automation. The research topics in this area rest on a long tradition in Karlsruhe and on unique synergies between informatics, mechanical and electrical engineering, sport sciences and social sciences, as well as successful collaborations with the Forschungszentrum Informatik (FZI) and Fraunhofer IOSB.
Following a system approach, research activities address basic and application-oriented methods for holistic engineering of intelligent and learning robots and autonomous systems that act in dynamic environments, learn from interactions and from humans to increase their degree of autonomy and their adaptability to new situations. These systems range from humanoid assistive robotics, medical robotics, industrial robotics, to production and logistics systems, robot-supported automation and intuitive multimodal human-machine interfaces. Special attention is paid to ethical, legal and social implications (ELSI) of robotics and autonomous systems, a key research of KIT which is covered by the KIT Center “Human and Technology” (MuT) and in KCIST through several PIs and interaction with MuT. This expertise makes KIT the right place for robotics and autonomous systems to move forward to promote sustainable progress.

 was featured at the virtual results conference of the high-tech forum on April 21, 2021. Video starts at 1:08:35.")
The activities in this Topic can be divided into the following main focus areas:
Human-machine interaction and communication
This includes understanding natural language and multimodal interaction through the acquisition and interpretation of visual, acoustic, and haptic signals, as well as biosignals to facilitate natural and intuitive human-machine interfaces and collaboration between humans and machines/robots. In addition, it includes research on telepresence methods and AR/VR technologies for robot control in remote and/or inhuman environments, as well as in medicine.
Humanoid assistive and collaborative robotics
Focus on integrating AI, informatics and mechatronics for the engineering of human-centered humanoid robots with versatile abilities and holistic functional hardware-software architectures. The conducted research addresses the mechano-informatics of robotics, dexterous grasping and manipulation, learning from human observation, from interaction and collaboration with humans, and from sensorimotor experience.
Wearable robotics and assistive technologies
Transfer of knowledge from humanoid robotics to prosthetics, orthotics and exoskeleton research to develop symbiotic wearable robots for augmentation of humans’ motor abilities at home and work and for compensation of motor limitations. A special focus is laid on novel soft designs compatible with the human body morphology, and on novel interfaces to the human body for intuitive and effortless control. Further, research is conducted on the development of assistive technologies for people with visual disabilities at the center for visually impaired persons (SZS).
Medical robotics and biomedical engineering
Methods and systems for minimally invasive, robot-assisted surgery and assistance systems to support surgeons in the operating room of the future. This includes design of innovative systems for surgical robotics, medical image processing and methods for the interpretation of pre-, intra- and postoperative heterogeneous information in robot-assisted surgery.
Industrial robotics and automation
This includes applications of industrial robots and automation technologies in several application areas such as agile manufacturing and flexible handling, assembly and disassembly, intelligent logistic systems, automated image-based identification and sorting of biomaterials. In addition, safety concepts in industrial setups are investigated by developing real-time trajectory generation methods and collision-free motion planning.
Production automation
This includes the development of methods and systems for agile and highly flexible and reconfigurable industrial production while taking uncertainty of production requirements and products into account. To this end, novel concepts of future factories in terms of novel highly flexible robot kinematics and AI-enabled industrialization of immature manufacturing and remanufacturing processes.
Autonomous driving
The research focuses on real-time perception, motion planning and control for self-driving automobiles including the design of holistic hardware-software architecture for safety-critical applications as well as methods for testing and validation. This research has a broad scope at KIT, which is also covered by the research activities of the KIT Center “Mobility Systems.”
Technology Assessment for autonomous systems and robotics
The research activities in this topic are accompanied with a serious consideration of ethical, legal and social implications of robotics and autonomous systems as we consider these their acceptance by the society. This consideration concerns, e.g., research on wearable robotics as well as autonomous driving.
YouTube channel of the research group High Performance Humanoid Technologies (H²T)
To the Youtube Channel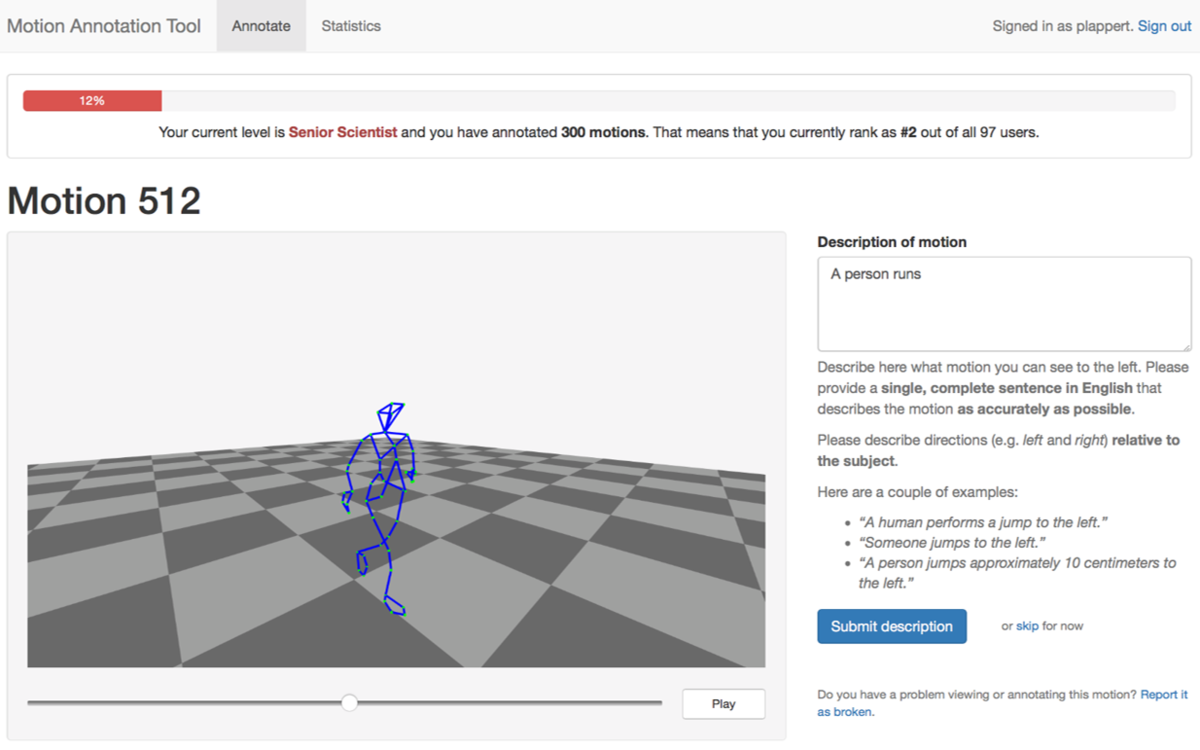
With the KIT Motion-Language Dataset, we aim to provide an open large-scale dataset of natural language annotations
Link to the database